
简介
有一款游戏叫《大家一起来找茬》不知道大家有没有玩过,就是给出2张相似图片,在规定的时间内找出图片上有几处不同并标记出来。本文将介绍如何通过opencv替代肉眼快速找出准确的答案。
材料准备
- 通过搜索引擎,找出要比较的素材。如下

- 将素材裁剪成2张图片
// ubuntu 系统命令裁剪
convert -crop 50%x100% image01.jpg image01.png
上面命令将生成image01-0.png和image01-1.png两张图片,至今素材准备完毕
环境
- python3
- ubuntu
暴力匹配
def matchAB(fileA, fileB):
# 读取图像数据
imgA = cv2.imread(fileA)
imgB = cv2.imread(fileB)
# 转换成灰色
grayA = cv2.cvtColor(imgA, cv2.COLOR_BGR2GRAY)
grayB = cv2.cvtColor(imgB, cv2.COLOR_BGR2GRAY)
# akaze特征量抽出
akaze = cv2.AKAZE_create()
kpA, desA = akaze.detectAndCompute(grayA, None)
kpB, desB = akaze.detectAndCompute(grayB, None)
# BFMatcher定义和图形化
bf = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
matches = bf.match(desB, desB)
matches = sorted(matches, key=lambda x: x.distance)
matched_image = cv2.drawMatches(imgA, kpA, imgB, kpB, matches, None, flags=2)
plt.imshow(cv2.cvtColor(matched_image, cv2.COLOR_BGR2RGB))
plt.show()
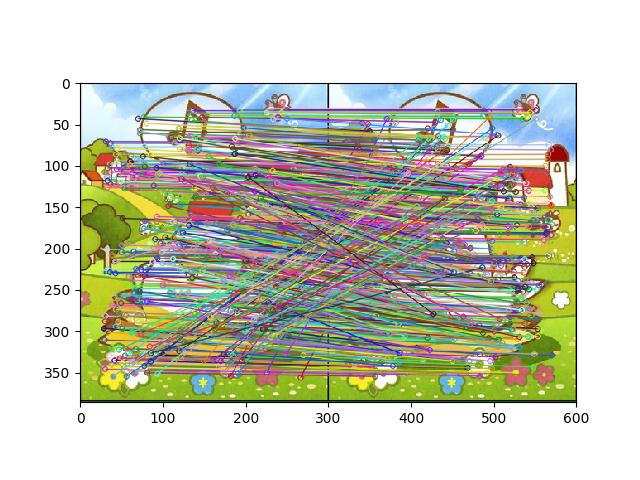
从上图可以看出,图片上大概的轮廓都标记并匹配上,但两张图片的不同之所才几个,用这样的方法就没啥效果了
图片重合匹配
通过2个图片重叠在一起,再找出2张图片上轮廓不同的地方。可能两张图片由于裁剪等原因,会有位置偏移的情况,所以以图片A为参照物,去寻找图片B的最佳重合位置,然后再查找图片的不同之处。
def matchAB(fileA, fileB):
# 读取图像数据
imgA = cv2.imread(fileA)
imgB = cv2.imread(fileB)
# 转换成灰色
grayA = cv2.cvtColor(imgA, cv2.COLOR_BGR2GRAY)
grayB = cv2.cvtColor(imgB, cv2.COLOR_BGR2GRAY)
# 获取图片A的大小
height, width = grayA.shape
# 取局部图像,寻找匹配位置
result_window = np.zeros((height, width), dtype=imgA.dtype)
for start_y in range(0, height-100, 10):
for start_x in range(0, width-100, 10):
window = grayA[start_y:start_y+100, start_x:start_x+100]
match = cv2.matchTemplate(grayB, window, cv2.TM_CCOEFF_NORMED)
_, _, _, max_loc = cv2.minMaxLoc(match)
matched_window = grayB[max_loc[1]:max_loc[1]+100, max_loc[0]:max_loc[0]+100]
result = cv2.absdiff(window, matched_window)
result_window[start_y:start_y+100, start_x:start_x+100] = result
plt.imshow(result_window)
plt.show()
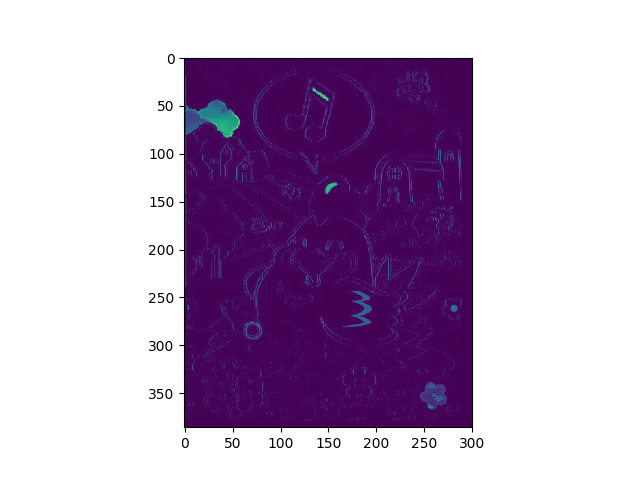
从上图,大概可以知道两张图片不同的部分大致在哪里。当两张图片不同部位颜色对比明显时,表示计算机更容易识别。
基于图片重叠匹配结果标记位置
从图片重叠匹配结果中获取不同部分的坐标值,根据坐标值依次在原图片上进行标记。
def matchAB(fileA, fileB):
# 读取图像数据
imgA = cv2.imread(fileA)
imgB = cv2.imread(fileB)
# 转换成灰色
grayA = cv2.cvtColor(imgA, cv2.COLOR_BGR2GRAY)
grayB = cv2.cvtColor(imgB, cv2.COLOR_BGR2GRAY)
# 获取图片A的大小
height, width = grayA.shape
# 取局部图像,寻找匹配位置
result_window = np.zeros((height, width), dtype=imgA.dtype)
for start_y in range(0, height-100, 10):
for start_x in range(0, width-100, 10):
window = grayA[start_y:start_y+100, start_x:start_x+100]
match = cv2.matchTemplate(grayB, window, cv2.TM_CCOEFF_NORMED)
_, _, _, max_loc = cv2.minMaxLoc(match)
matched_window = grayB[max_loc[1]:max_loc[1]+100, max_loc[0]:max_loc[0]+100]
result = cv2.absdiff(window, matched_window)
result_window[start_y:start_y+100, start_x:start_x+100] = result
# 用四边形圈出不同部分
_, result_window_bin = cv2.threshold(result_window, 30, 255, cv2.THRESH_BINARY)
_, contours, _ = cv2.findContours(result_window_bin, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
imgC = imgA.copy()
for contour in contours:
min = np.nanmin(contour, 0)
max = np.nanmax(contour, 0)
loc1 = (min[0][0], min[0][1])
loc2 = (max[0][0], max[0][1])
cv2.rectangle(imgC, loc1, loc2, 255, 2)
plt.subplot(1, 3, 1), plt.imshow(cv2.cvtColor(imgA, cv2.COLOR_BGR2RGB)), plt.title('A'), plt.xticks([]), plt.yticks([])
plt.subplot(1, 3, 2), plt.imshow(cv2.cvtColor(imgB, cv2.COLOR_BGR2RGB)), plt.title('B'), plt.xticks([]), plt.yticks([])
plt.subplot(1, 3, 3), plt.imshow(cv2.cvtColor(imgC, cv2.COLOR_BGR2RGB)), plt.title('Answer'), plt.xticks([]), plt.yticks([])
plt.show()
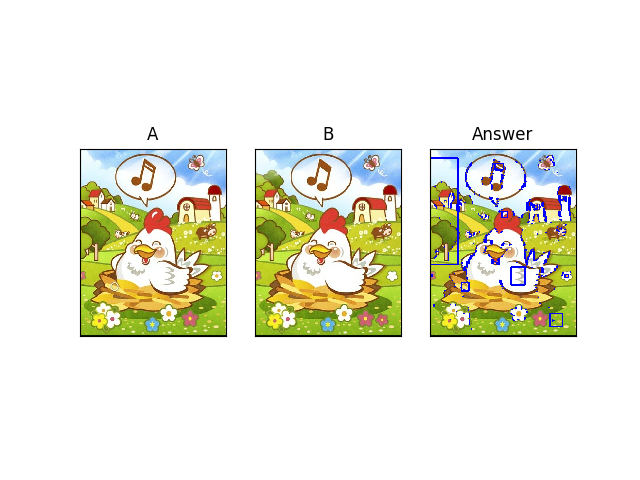
从上图四边形所圈出的不同部分就是分析出来的结果。但细心的朋友会发现,右上角的屋顶的条纹,程序并没有给出。
这时,我们可能需要调整程序的cv2.threshold的阈值来提高精度。有兴趣的同学可以亲自动手实验下。
源代码仓库
https://github.com/cangyan/image-detect